对于程序员们,日常是在windows下工作,但有的工程项目又要在Linux下开发。怎么办呢? 1.windows 设置 -> 更新和安全 -> 开发者选项,选择“开发人员模式” 这儿,总共17行命令,都有我标记的注释。即便你要安装别的库,可能对你也有启发意义。 //备份.list文件 2 sudo vi /etc/apt/sources.list 3 sudo apt-get update //找到ros源文件 //公钥验证一下 //安装编译环境 //安装ros,失败的话是网络问题,多重新来两次就好了 //让环境变量起作用 //在home下.bashrc文件中追加ros环境变量 //此时输入rviz可以正常可视化 //如果ubuntu 18.04 lz4 编译冲突时, 有些基本操作,比如怎么在vi打开文件以后修改文件,大家自行百度吧。
很多人装了虚拟机,慢慢你发现虚拟机那个慢啊,以及出现很多错误你都找不到原因。
然后装个双系统吧,来回切系统极不方便,有时候一天开机十几次。在Linux下跑东西时,自己又啥也不能干。而且安装双系统时,很有可能把自己原来的windows搞崩溃。
那么,告别这些远古时代的操作,我们在win10下安装Linux子系统。从此,即能充分发挥计算机硬件资源的计算速度,你又可以在两个系统下同时开工。爽哉!一、安装几个软件

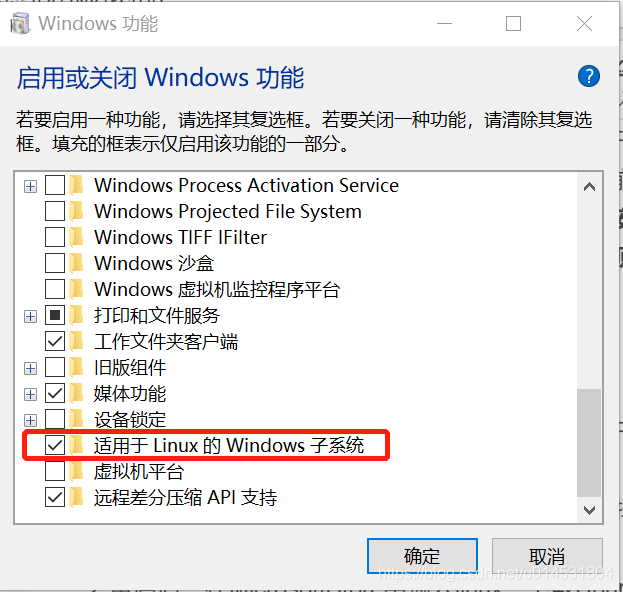
控制面板 -> 卸载程序 -> 启用或关闭windows功能,选择“适用于Linux的Windows子系统”
2.重启后,在MicrosoftStore中输入linux,下载Ubuntu 18.04 LTS,然后安装

3.百度一下,安装mobaxterm和xming
都是一键安装,然后双击
可以看到已经自动识别了你安装的子系统
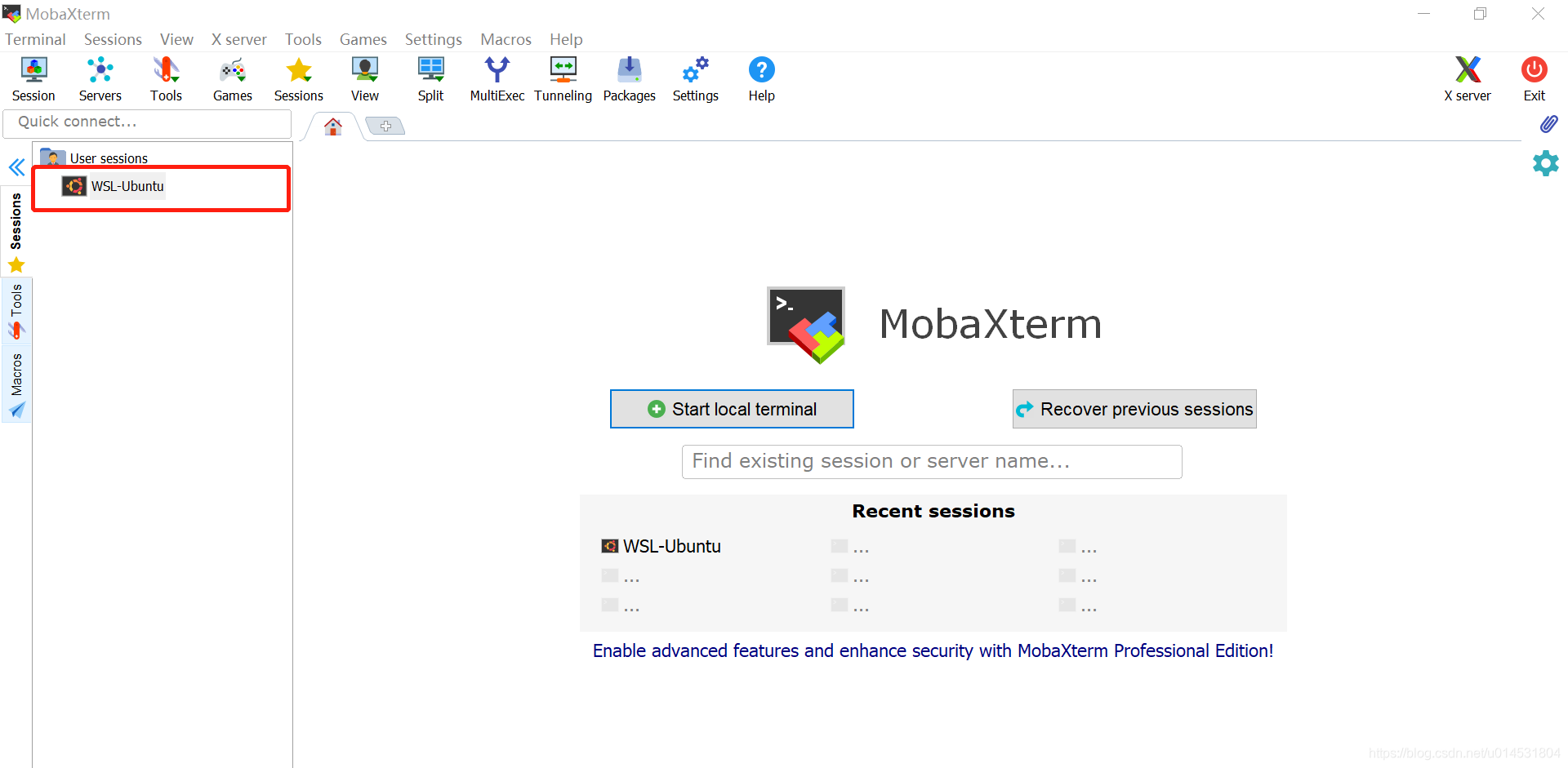
双击子系统,打开了终端,设置自己的用户名和密码。这个时候,我们的子系统安装就搞定了。二、命令行安装ROS
1 sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
//ubuntu官方的源更新很慢,删除里面的内容,拷贝中科大的源
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
4 sudo apt-get upgrade
5 sudo sh -c ‘. /etc/lsb-release && echo “deb https://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main” > /etc/apt/sources.list.d/ros-latest.list’
6 sudo apt-get update
7 sudo apt-key adv –keyserver keyserver.ubuntu.com –recv-keys F42ED6FBAB17C654
8 sudo apt-get update
9 sudo apt-get install build-essential
10 sudo apt-get install ros-melodic-desktop-full
11 source /opt/ros/melodic/setup.bash
12 echo “source /opt/ros/melodic/setup.bash” >> ~/.bashrc
13 vi ~/.bashrc
//最后一行加: export LIBGL_ALWAYS_INDIRECT= =
14 source ~/.bashrc
15 rviz
16 sudo vi /usr/include/lz4.h
17 sudo vi /usr/include/flann/ext/lz4.h
将两个头文件: /usr/include/lz4.h 和 /usr/include/flann/ext/lz4.h 下的 #pragma once
替换为:
ifndef LZ4_H_2983827168210
define LZ4_H_2983827168210
…
endif /* LZ4_H_2983827168210 */
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)










