因为新加入的第七轴和机器人的六个轴为一组,因此只需要在示教器点击shift+J7
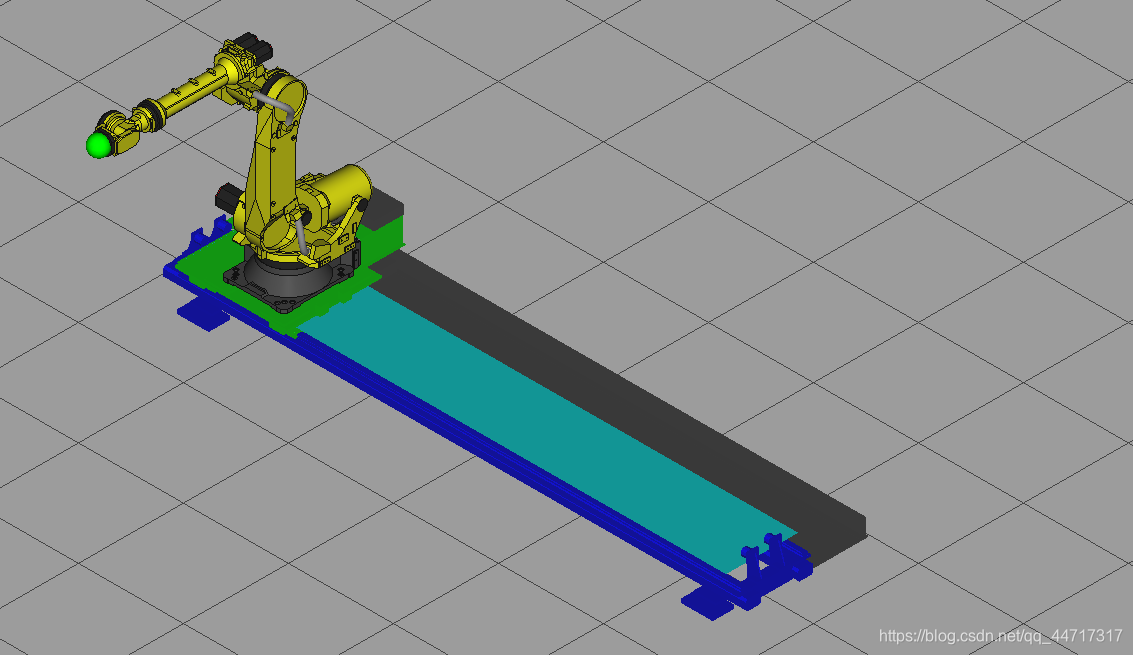
效果展示
移动搬运项目地址:
【ROBOGUIDE仿真】:导轨机器人多物料搬运工作站
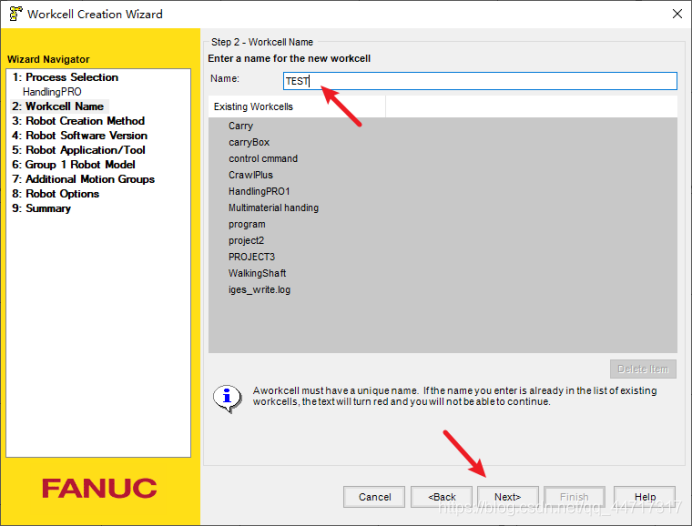
工程的创建
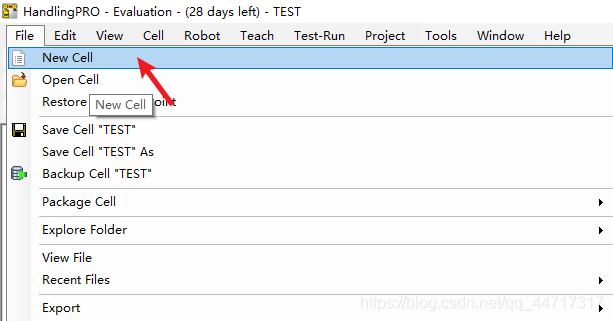
HandingPRO

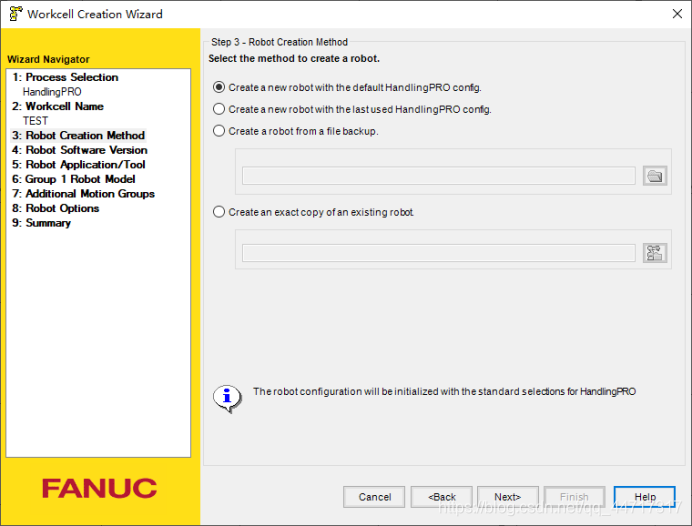
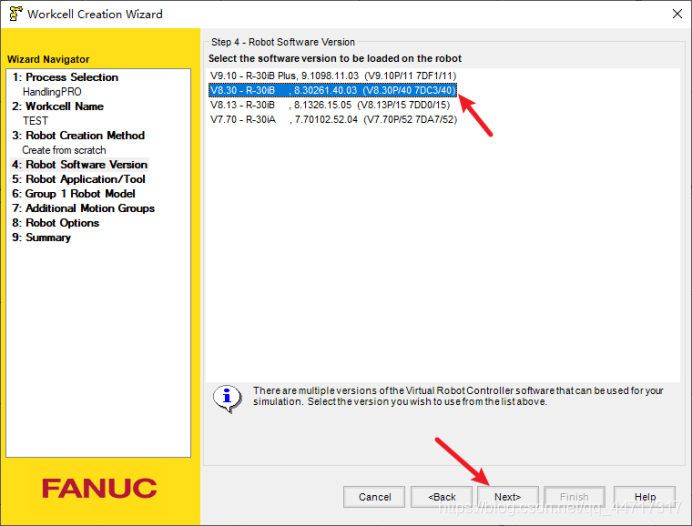
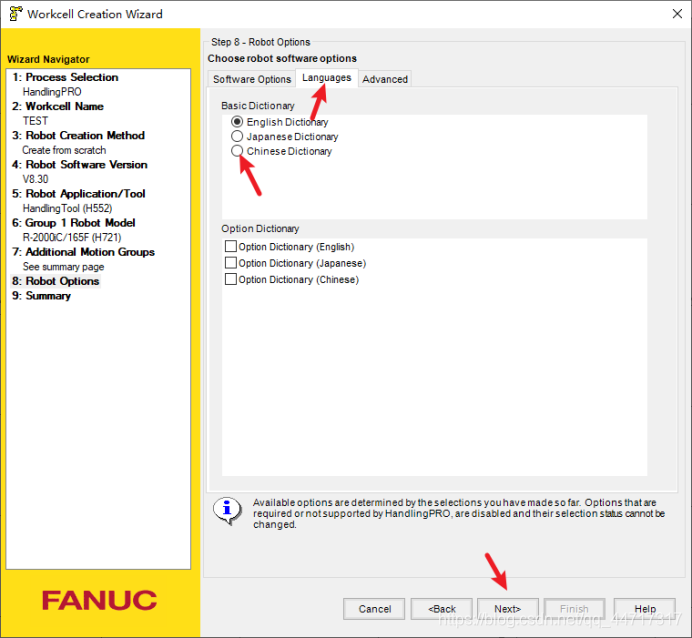
3. 选择控制器版本,这里选择8.3版本
4. 选择HandingTool

5. 选择机器人型号,这里选择 ROBOT H721
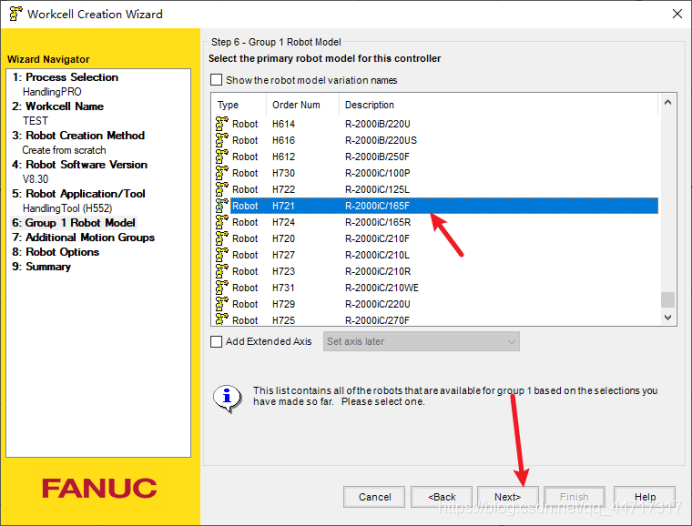
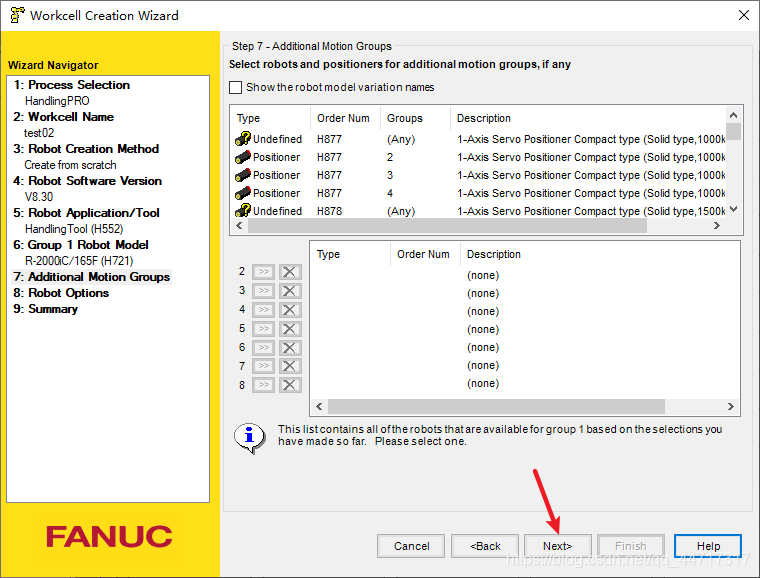
6. 选择下一步
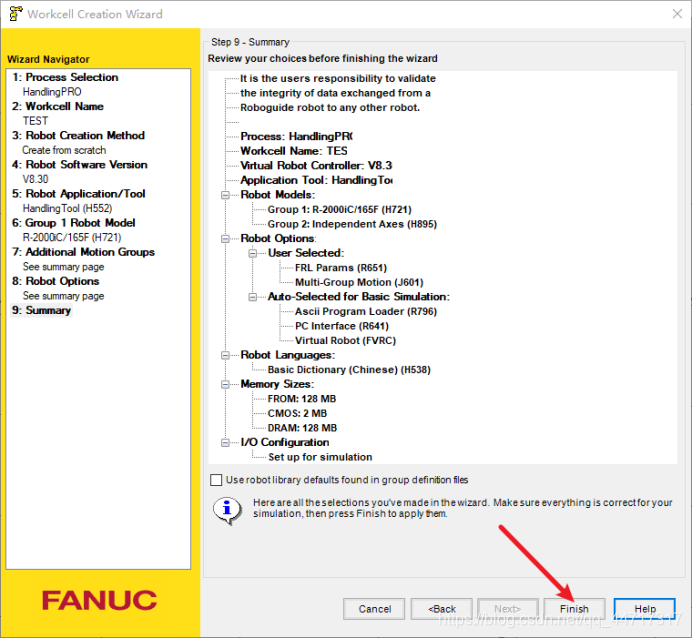
Finsh完成创建;
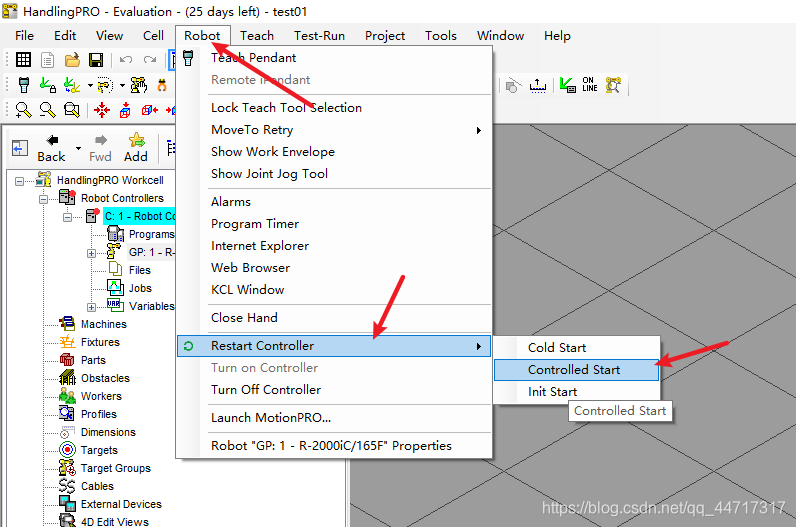
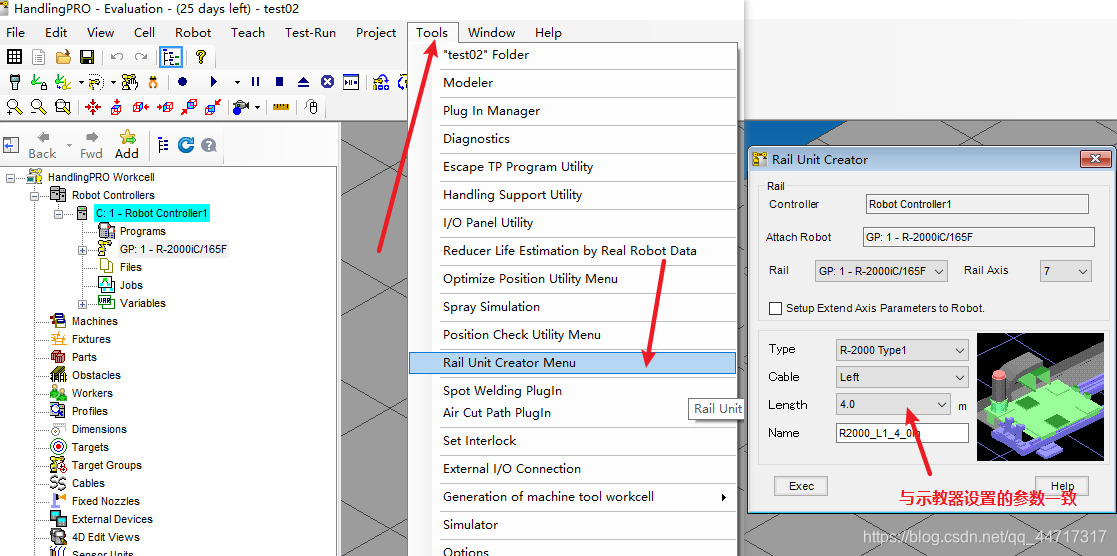
用控制启动方式新建行走轴
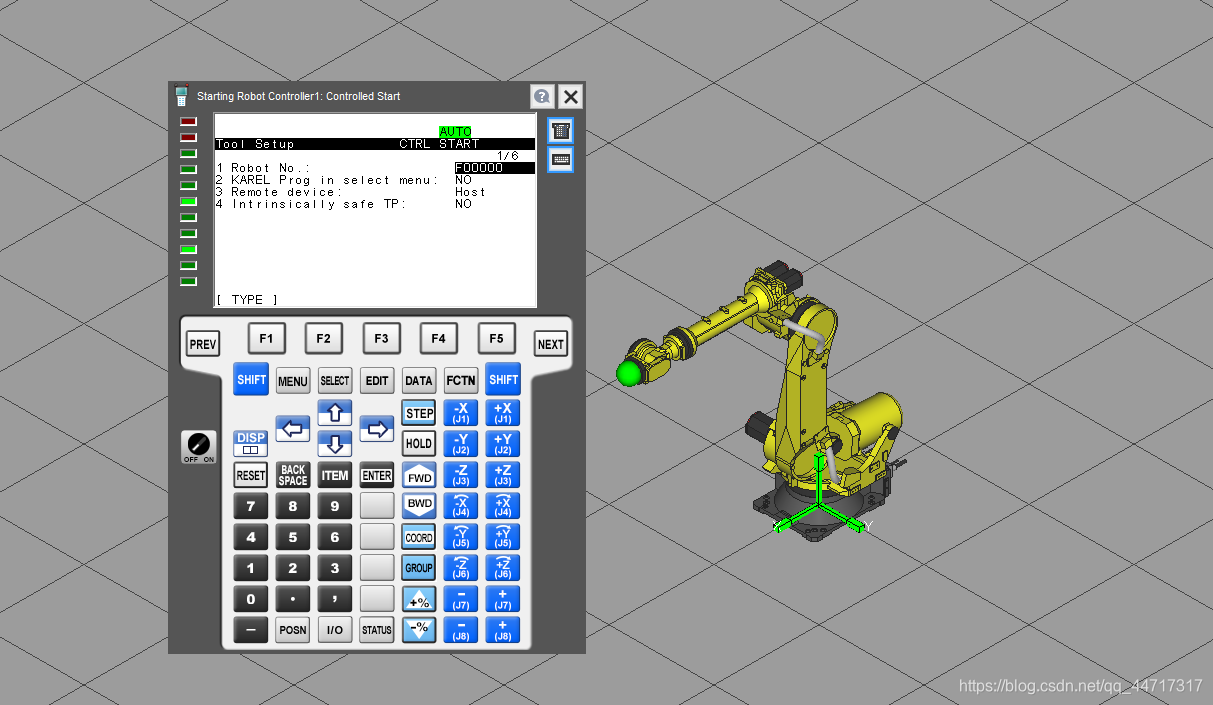
示教器参数设置
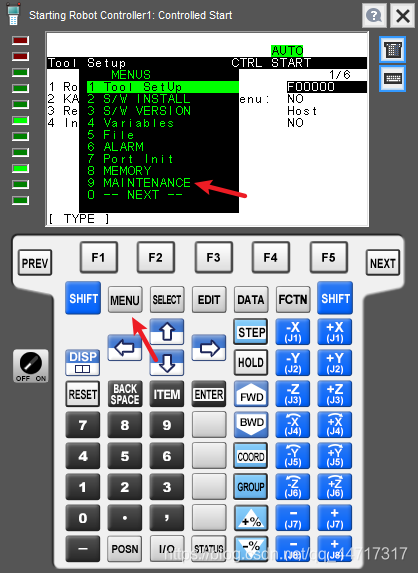
menu,选择9:机器人设定
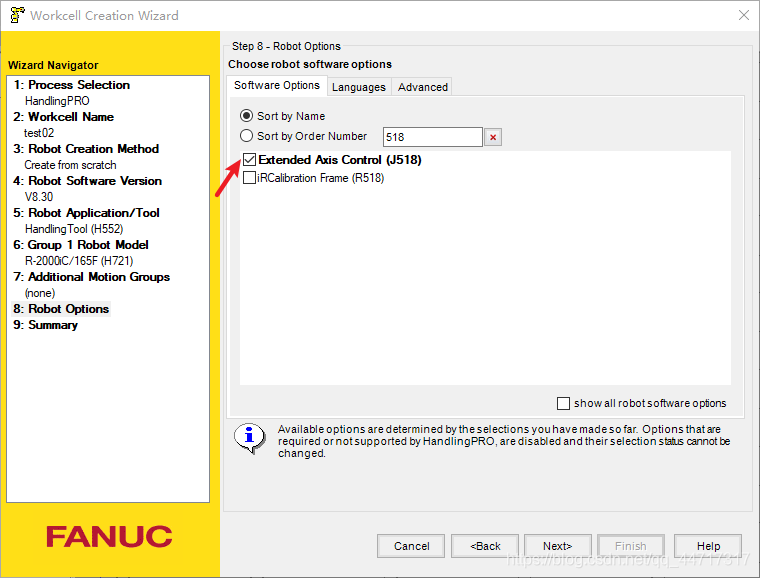
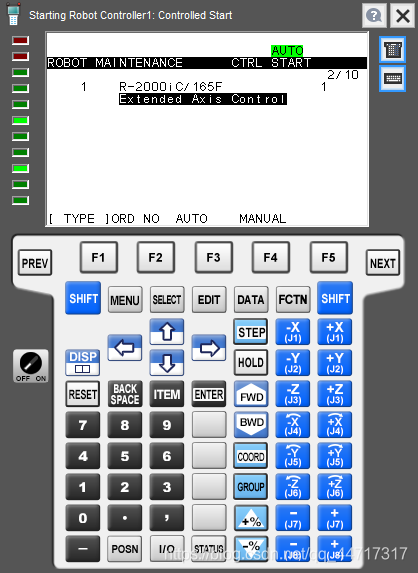
Extend Axis Control然后使用示教器上的F4进入menu


. 


7. 选择添加轴的方式 增强版:2

8. 附加轴的伺服电机的种类:62

9. 选择点击类型及电流控制值:2

10. 选择轴的形态(因为是把附加轴和机器人的六个轴作为一个组,即集成的,而且是线性的):1

11. 将行走抽添加的Y方向:2

12. 设置减速比(即电机旋转一周附加周可以增加多少mm(线性),或多少的角度(旋转)):10

13. 建议速度:2

14. 附加轴相对电机的旋转的方向:2

15. 设置附加轴最高限制,即导轨的长度 :4000

16. 设置最低限制:-100(此时允许用户操作时超程100)

17. 输入0点 即坐标原点:0

18. 设置加速时间:2

19. 设置最小加速时间:2

20. 电机负载的载重比:3

21. 设置伺服放大器编号:2

22. 设置伺服放大器类型:2

23. 选择抱闸:1(表示与六个轴相连)

24. 伺服的超时设定:1

25. 伺服电机的关闭时间:30

26. 设置完成,退出;


27. 到这下面这个见面先不用着急,下面进入冷启动
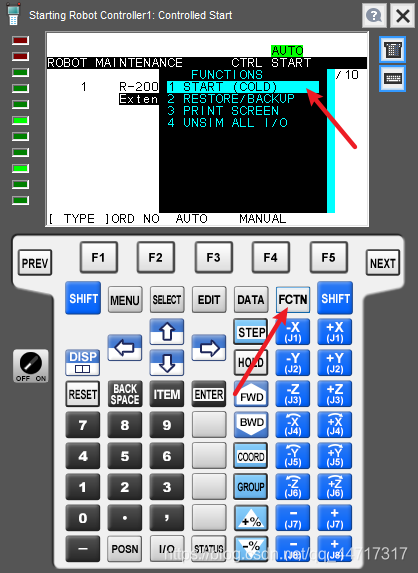
28. 点击FCTN进入冷启动1然后确认
加入导轨
在新建轴点动机器人
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)

