随着自动驾驶的发展,现代汽车的智能化程度逐步提高,基于视觉系统的自动驾驶也逐步趋于稳定——特斯拉、Mobileye、CommaAI等机构起着推波助澜的作用。 自动驾驶场景或者Adas场景中,当检测出前方车辆后通常需要进行距离估计,为车辆控制提供距离参考信息;而基于视觉的移动机器人也存在该需求。单目摄像头光学图像测距具有低成本和计算快的优点,主要有两种常用的测距方式1。 本文将介绍第二种测距方式。 该部分直接引用自参考文献2 投影关系图和投影平面2如下所示, 取路面上一点 相关概念请参见博客:相机焦距与视场角 根据三角函数关系和相似三角形可得, 注:计算角度 x为空间点在投影面上的x轴坐标 代码很简单,后续补充上来。 Alizadeh, Peyman. Object distance measurement using a single camera for robotic applications. Diss. Laurentian University of Sudbury, 2015. ↩︎ 郭磊, 徐友春, 李克强, & 连小珉. (2006). 基于单目视觉的实时测距方法研究 (Doctoral dissertation). ↩︎ ↩︎
1. 前言
2. 几何关系示意图
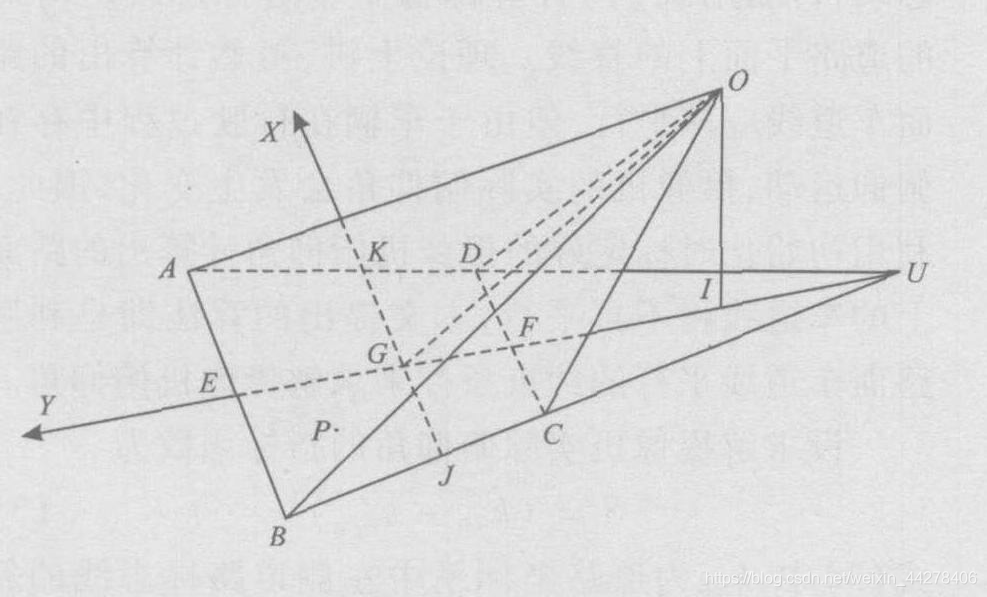
平面
代表路平面,
为摄像头拍摄到的路平面上的梯形区域,
为摄像机
点为摄像机镜头中心点,
为摄像机光轴,
点为摄像机光轴和路平面的交点(同时也是视野梯形的对角线交点),
点为
点在路平面上的垂直投影。在路面坐标系中, 将
点定义为坐标系原点,,车辆前进方向定义为
轴方向。
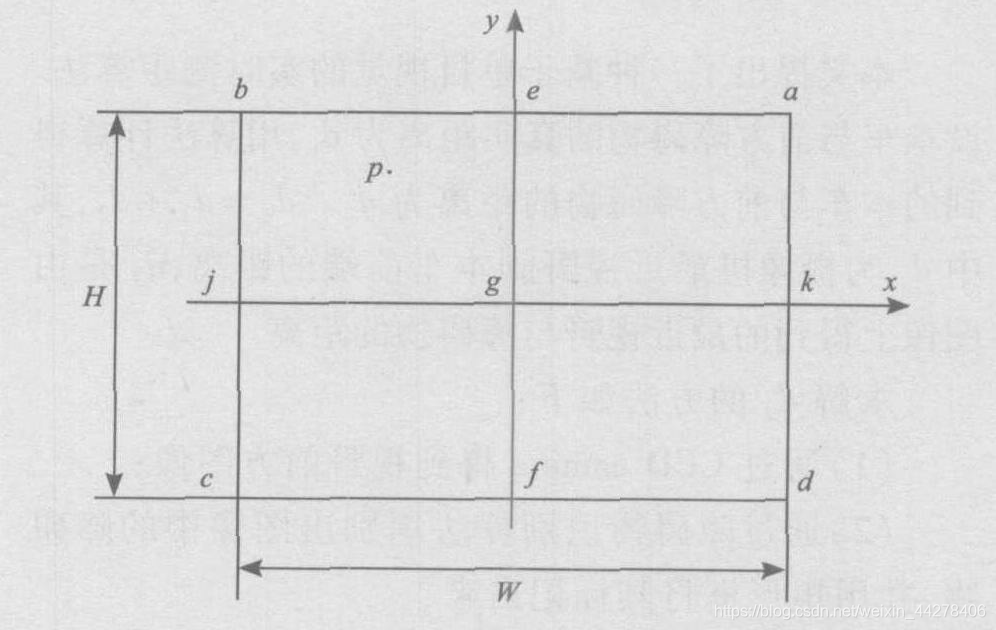
各点在图像平面内的对应点上图所示,
为像平面矩形的4个端点,
和
分别为像平面的高和宽。定义图像矩形的中点
为像平面坐标系的坐标原点,y 轴代表车辆前进方向。
,其在路平面坐标系的坐标为
,
点在图像平面内的对应点为
, 其在像平面坐标系的坐标为
。3. 距离计算
3.1 参数
3.2 Y轴方向的成像模型2
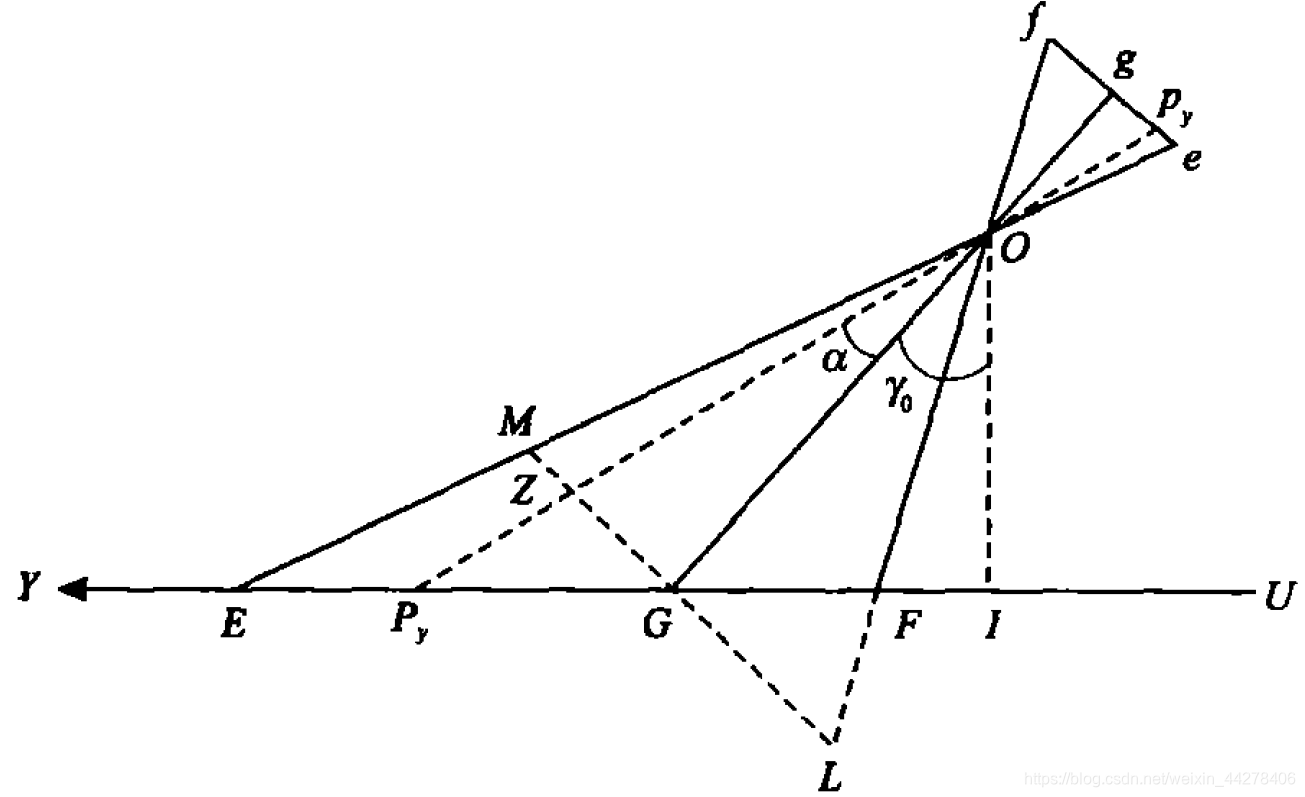
摄像头光轴(
)所在的与路面相垂直的平面为
。图中各字符与几何关系示意图中对应字符含义相同。直线
与直线
垂直,与直线
的延长线相交于点
。点
表示像平面上的点
在直线
上的投影(
轴方向),
点是路面上的点
在视野纵向对称线上的投影,Z是直线
与直线
的交点。
所以,
那么,
时,y为空间点在投影面上的y轴坐标,是有符号的,H为图像高度。3.3 X轴方向的成像模型
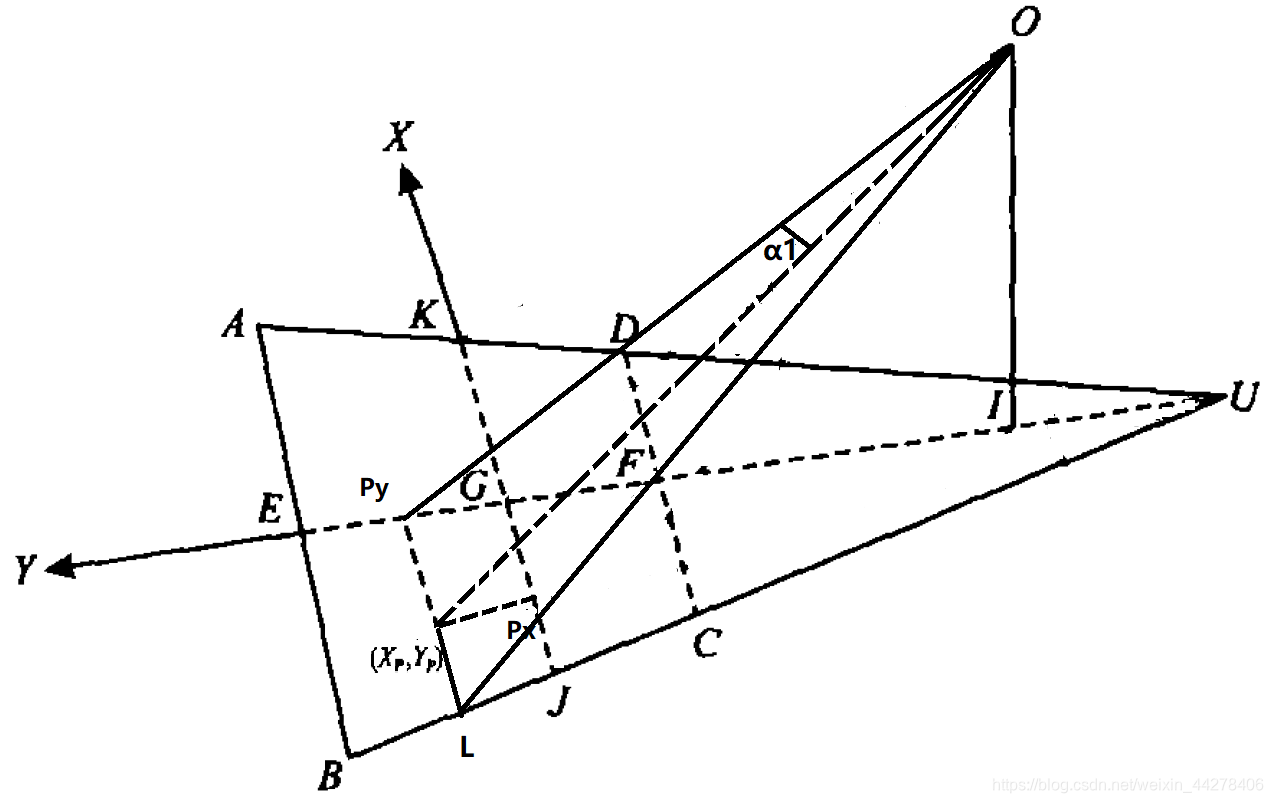
为点P在X轴上的投影点,
在三角形
中,
根据P点成像的相似三角形可得,
综上,
4. Show me the code
Reference
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)











