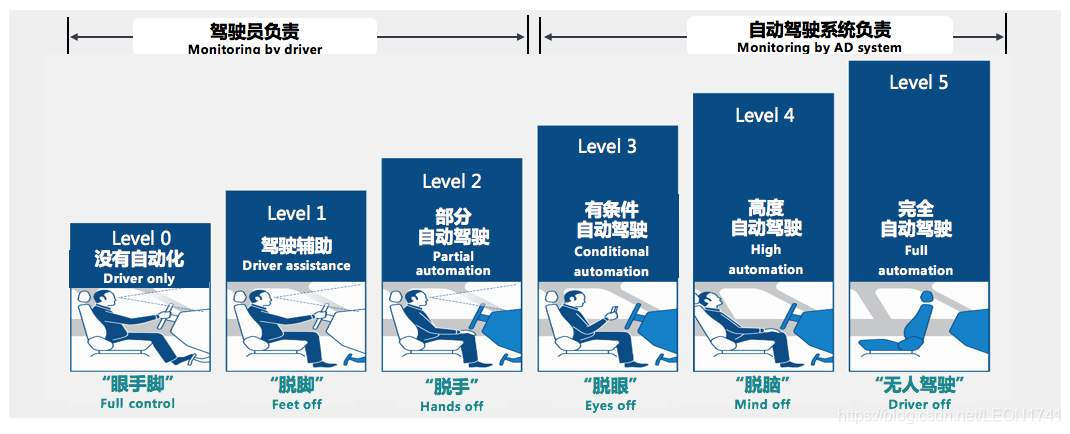
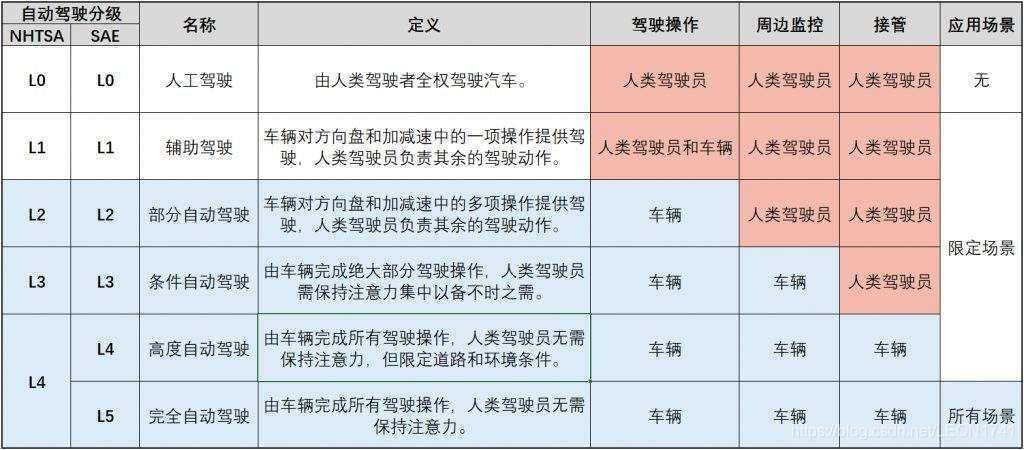
自动驾驶分为 6 个等级: Level 0:人工驾驶,无驾驶辅助系统,仅提醒。 Level 1:辅助人工驾驶,可实现单一的车速或转向控制自动化,仍由人工驾驶(如定速巡航、ACC)。 Level 2:部分自动驾驶,可实现车速和转向控制自动化,驾驶员必须始终保持监控(如车道中线保持)。 Level 3:有条件自动驾驶,可解放双手(hands off),驾驶员监控系统并在必要时进行干预。 Level 4:高级自动驾驶,可解放双眼(eyes off),在一些预定义的场景下无需驾驶员介入。 Level 5:全自动驾驶,完全自动化,不需要驾驶员(driverless)。 关于自动驾驶的基本原理,需了解三大关键词:传感器、数据融合(Data Fusion)、100%安全性决策。 自动驾驶需要的传感器系统主要有三种类型:摄像头、雷达和激光雷达。 摄像头是自动驾驶必备的传感器,包括前视、后视和 360 度摄像系统,后视和 360 度摄像头主要提供 360 度外部环境呈现,前视摄像头主要用于识别行人、车辆、道路、交通标志等。 自动驾驶需要多个雷达传感器,其功能是无线探测和测距,主要用于盲点检测、防碰撞、自动泊车、制动辅助、紧急制动和自动距离控制等应用。目前的雷达系统主要基于 24GHz 和 77GHz,相较于 24GHz,77GHz 在测量距离和速度时具有更高的精度,以及更高的角分辨率,且还具备天线尺寸小、干扰小等优点。 LiDAR,即 Light Detection And Ranging 的缩写,它是一种基于激光的系统,除发射器(激光器)外,系统还具备高灵敏度的接收器。LiDAR 主要用于测量静止和移动物体的距离,并通过处理提供所检测物体的三维图像。 LiDAR 应用于自动驾驶所面临的挑战是,如何克服在雨雪、雾、温度等环境影响下识别较远距离的物体,同时,这玩意成本太高,目前不适合汽车领域的大规模部署。 数据融合就是将不同传感器(如雷达、摄像头和激光雷达)数据进行智能化合成,实现不同信息源的互补性、冗余性和合作性,从而做出更好、更安全的决策。比如摄像头具有分辨颜色(识别指示牌和路标)的优势,可易受恶劣天气环境和光线的影响,但雷达在测距、穿透雨雾等有优势,两者互补融合可作出更精确、更可靠的评估和判断。 一旦出现交通事故,重则导致人身伤亡,因此,自动驾驶对技术安全的要求相当苛刻,需实现接近 100%的安全性。 简而言之,自动驾驶就是通过传感器收集全面的环境信息,再对信息融合处理,并作出接近 100%安全性决策。 目前多数人所谈的自动驾驶,都是基于汽车本地端的传感器、数据融合来实现决策的。 但是,你有没有想过,这种单凭本地端实现的方式存在一些局限性。 当汽车横穿十字路口时,自动驾驶能预知从左侧高速驶来的大卡车吗? 由于易受雨、雪、雾、强光等环境影响,摄像头能始终准确识别指示牌和红绿灯吗? 再举一个例子。 当自动驾驶在高速路上以 130 公里 / 小时行驶时,摄像机 / 雷达融合无法安全地检测到前方超过 120 米距离外的停车,这将触发超过 5 米每平方秒的紧急制动,这是无法接受的。 总之,道路环境异常复杂,雷达、摄像头和激光雷达等本地传感系统受限于视距、环境等因素影响,要实现 100%安全性,自动驾驶需要弥补本地传感器所欠缺的感知能力。 简单的理解,本地传感系统让汽车实现了“眼观六路”,但自动驾驶还需要“耳听八方”。 这就需要 C-V2X 闪亮登场。 C-V2X,C 即 Cellular,V2X 就是 vehicle-to-everything,指车与外界的信息交换,它是基于蜂窝网络的车联网技术。 C-V2X 指从 LTE-V2X 到 5G V2X 的平滑演进,它不仅支持现有的 LTE-V2X 应用,还支持未来 5G V2X 的全新应用。它基于强大的 3GPP 生态系统和连续完善的蜂窝网络覆盖,可大幅降低未来自动驾驶和车联网部署成本。 与雷达、激光雷达等传感器不同,我们可以把 V2X 视为一种无线传感器系统的解决方案,它允许车辆通过通信信道彼此共享信息,它可检测隐藏的威胁,扩大自动驾驶感知范围,能预见接下来会发生什么,从而进一步提升自动驾驶的安全性、效率和舒适性。C-V2X 被认为是自动驾驶的关键推动因素之一。 C-V2X 能做什么呢?还是继续举例吧。 幸运的是,我们有 V2X。 再来一个案例。 当驾驶员刚打左转灯准备超车时,V2X 通过显示屏立即提示,前方有来车,不能超车… 直到危险解除后,才顺利超车,安全通过。 V2X 主要包括 V2N(车辆与网络 / 云)、V2V(车辆与车辆)、V2I(车辆与道路基础设施)和 V2P(车辆与行人)之间的连接性。 在 Rel. 14 中,V2V 通信基于 D2D( Device-to-Device)通信,其为 Rel.12 和 Rel.13 版本中的 Proximity Services (ProSe) 近距离通信技术的一部分。新的 D2D 接口被命名为 PC5 接口,以实现可支持 V2X 要求的增强型功能,这些增强型功能包括:支持高达 500Km / h 的相对车速、支持 eNB 覆盖范围内的同步操作、提升资源分配性能、拥塞控制和流量管理等。 在 Rel. 14 中,LTE-V2X 主要有两种操作模式:通过 PC5 接口点对点通信(V2V)和通过 LTE-Uu 与网络通信(V2N)。 基于 PC5 接口的 V2V 通信也包括两种模式:管理模式(PC5 Mode 3)和非管理模式(PC5 Mode 4),当网络参与车辆调度时称为管理模式,当车辆独立于网络时称为非管理模式。在非管理模式下,基于车辆间的分布式算法来进行流量调度和干扰管理;在管理模式下,通过 Uu 接口的控制信令由基站(eNB)辅助进行流量调度和干扰管理。 除了 PC5 和 Uu 接口,C-V2X 技术构架还包括 V2X 控制功能、边缘应用服务器和 V2X 应用服务器。 V2X 控制功能(V2X control function)位于核心网,其为实现 V2X 通信向 UE 提供必要的参数以执行相关网络动作。 V2X 应用服务器可部署于网络之外,由车企、移动运营商或第三方来运营,从而跨运营商跨车厂,这也解决了过去车企担心的依赖 C-V2X 会导致自动驾驶业务被电信运营商所控制的问题。 边缘应用服务器靠近数据源部署,解决了时延和网络负荷问题,将在许多 V2X 用例(比如实时高清地图更新等)中发挥重要作用。 目前基于 LTE 的 V2N 已经覆盖了很多车联网用例,比如交通信息提示、地图更新、OTA 固件更新。未来 V2V 和 V2I 将广泛应用于车联网的低时延、远距离通信场景。 你可以将 C-V2X 看成是连接 V2N 和 V2V/V2I 的粘合剂,其依托于成熟的蜂窝网络生态,随着 4G 向 5G 的技术演进,将在未来自动驾驶领域发挥关键的作用。 基于 5G 近实时的高清视频传输,V2N 和 V2V 互补(V2N2V),如前所述,让自动驾驶不仅能“眼观六路”,还能“耳听八方”,实现 100%安全性。 与互联网“尽力而为”的数据传输不同,网络切片可提供始终如一的低时延和高速率服务保障,这对于安全性要求极高的自动驾驶领域尤为关键。比如,当汽车行驶于网络拥塞区域(比如演唱会、体育场附近),网络切片技术仍然能优先保障汽车通信的高速率和低时延性能。 5G 核心网控制面与数据面彻底分离,NFV 令网络部署更加灵活,从而使能分布式的边缘计算部署。边缘计算将更多的数据计算和存储从“核心”下沉到“边缘”,部署于接近数据源的地方,一些数据不必再经过网络到达云端处理,从而降低时延和网络负荷,也提升了数据安全性和隐私性。 这对于时延要求极高、数据处理和存储量极大的自动驾驶领域而言,重要性不言而喻。未来对于靠近车辆的移动通信设备,如基站、路边单元等或均将部署车联网的边缘计算,来完成本地端的数据处理、加密和决策,并提供实时、高可靠的通信能力。 是的,自动驾驶需要 5G,但说到最后,对于 5G 自动驾驶,挑战在哪里? 想到了两点: 挑战一,网络频繁切换 5G 无线频率更高、覆盖范围小,未来城市的每个灯柱或将就是一个小基站,必然会带来基站间频繁切换的问题而影响自动驾驶能力,怎么破? C-RAN(Cloud RAN)构架可大幅降低切换开销。 挑战二,天线怎么安装 今天的 5G 手机面临的一大挑战是,天线太多,手机空间太小。未来的汽车也将面临这样的问题。 我们掐指算一下,未来的汽车将有多少无线系统?LTE V2X(5.8-5.9GHz)、卫星定位(1.57GHz,1.1-1.2GHz,1.6GHz)、蓝牙(2.4GHz)、WIFI(2.4GHz,5GHz)、3G/4G 网络(700MHz-2.6GHz)、雷达(76-77GHz)、5G NR(3.3-4.9GHz、6-80GHz)、无线充电等等。 这么多天线系统,在安装时必须考虑汽车的挡风玻璃、金属壳对无线信号的衰减影响,怎么破? 目前还没有成套的解决方案,但是可以预期的是,不久的将来,新材料天线、与车体集成的天线将应运而生,大家可以拭目以待!
一、什么叫自动驾驶
二、自动驾驶基本原理
1、传感器
1.1、摄像头
1.2、雷达(RADAR)
1.3、激光雷达(LiDAR)
2、数据融合(Data Fusion)
3、100%安全性决策
三、C-V2X 能做什么?

如上图,道路前方弯道处停有一辆抛锚的汽车,但由于正好处于弯道,汽车本地的摄像头、雷达等传感器无法检测到,眼看一场车祸正要酿成悲剧。
V2X 通过通信网络共享信息,具有“耳听八方”的能力,此时汽车显示屏上会提示前方有车辆,并启动减速和转向,安全通过。

如上图,前方的大卡车挡住了视线,而对面正驶来一辆汽车,此时要超车,毫无疑问是非常危险的。四、C-V2X 技术简介

2015 年,3GPP 在 Rel. 14 版本中启动了基于 LTE 系统的 V2X 服务标准研究,即 LTE-V2X,国内多家通信企业(华为、大唐、中兴)参与了 LTE-V 标准制定和研发。2016 年 9 月,首版涵盖了 V2V 和 V2I 的 V2X 标准发布;2017 年 6 月,进一步增强型 V2X 操作方案发布。
C-V2X 还将持续平滑演进到 5G V2X,将对功能进一步增强,以支持低延迟和高可靠性 V2X 服务。
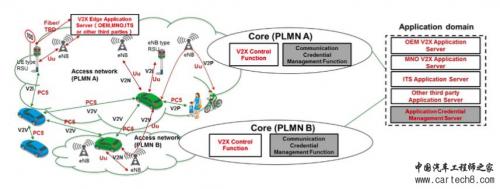
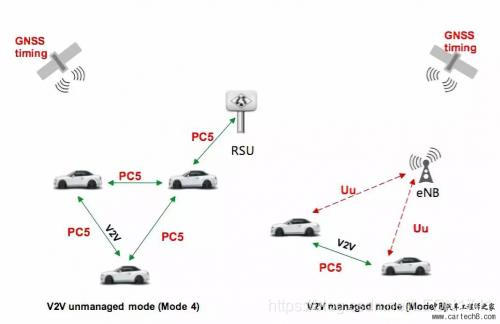
C-V2X 技术构架,来源 ngmn V2X 白皮书五、为何自动驾驶需要5G
1、5G的速度是最大的优势

2、5G 网络切片技术提供始终如一的 QoS 保障
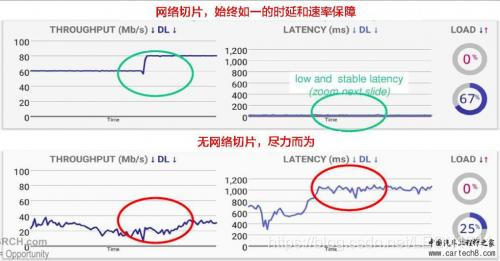
网络切片 vs 无网络切片性能监控3、边缘计算是自动驾驶的未来
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)

 博客专家
博客专家 








