假定负载转矩在永磁同步电机控制系统中被认作外部负载扰动,负载是不可测的,但是可观的。从而,依据PMSM数学模型(1)中进行负载转矩观测器的设计,具体如下: 假定针对控制系统中的直流电机引入未知的总扰动d(t)。由于仿真及实验设置采样时间相对于总扰动量变化过程是极小的,可将式(2)中总扰动量的微分量视为零[1],那么直流电机的运动方程和转矩方程并结合未知的总扰动d(t)进行设计干扰观测器。直流电机的运动方程和转矩方程如式(1)所示: 稳定性是系统可以工作的前提,因此有必要对所设计的干扰观测器进行稳定性分析。由式(5)可变换为状态空间方程如式(6)所示: (文献资源下载请转到:https://download.csdn.net/my)
负载转矩观测器的设计与仿真实现
1.1负载转矩观测器的设计




图1扰动观测器的原理结构图1.2负载转矩观测器的设计

1.3负载转矩观测器的仿真实现
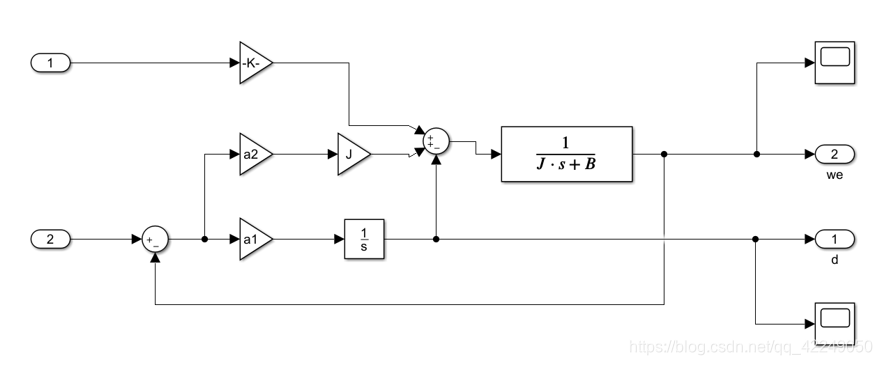
图2扰动观测器的Simulink仿真图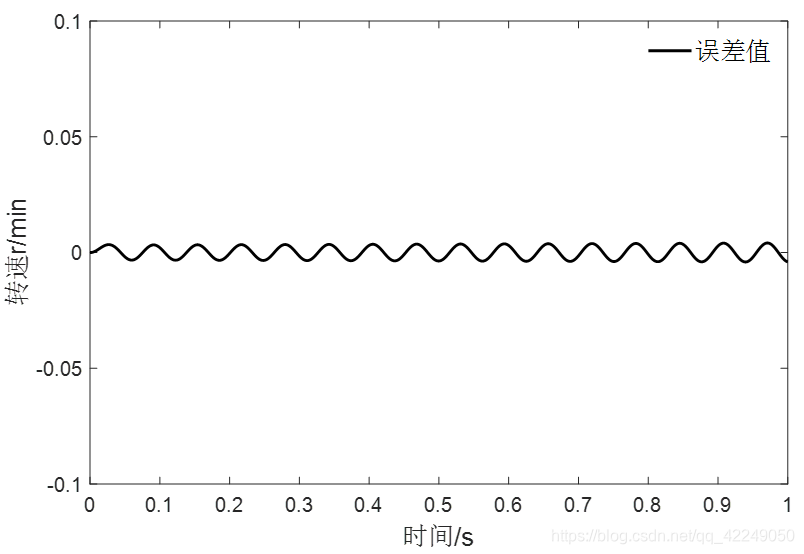
图3仿真中估计转速与实际转速的误差图参考文献
[1] Z. Kuang, B. Du, S. Cui and C. Chan, “Speed Control of Load Torque Feedforward Compensation Based on Linear Active Disturbance Rejection for Five-Phase PMSM,” IEEE Access, vol. 7, pp. 159787-159796, Oct, 2019, DOI.10.1109/ACCESS.2019.2950368.
[2] Y. Deng, J. Wang, H. Li, J. Liu and D. Tian, “Speed Control of PMSM with Sliding Mode Disturbance Observer,” in Proc. ICMA .Conf. , Changchun, China, 2018, pp. 2311-2315.
[3] J. Han, “From PID to Active Disturbance Rejection Control,” IEEE Trans.Ind. Electron, vol. 56, no. 3, pp. 900-906, Mar, 2009, DOI.10.1109/TIE.2008.2011621.
[4] Y. Deng, J. Wang, H. Li, J. Liu and D. Tian, “Adaptive sliding mode current control with sliding mode disturbance observer for PMSM drives,” ISA Transactions, vol. 88, pp.113-126. May, 2019, DOI.10.1016/j.isatra.2018.11.039.
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)









