关注公众号”小秋SLAM笔记”获取已经下载好的数据集 TUM1.yaml 是数据集 freiburg1 的相机参数 关注公众号”小秋SLAM笔记”获取已经下载好的数据集 关注公众号”小秋SLAM笔记”获取已经下载好的数据集 关注公众号”小秋SLAM笔记”获取已经下载好的数据集 生成深度图和彩色图时间戳对其的文件 associate.py 下载地址 Intel RealSense SDK D435i 官方安装卸载教程 Intel RealSense ROS Wrapper D435i 官方安装卸载教程 安装 Realsense_ros 新开终端输入 左上角 Displays 中 Fixed Frame 选项中,下拉菜单选择 camera_link,可以看到 Global Status 变成了绿色 最后 点击Add -> By display type -> Image -> ok 单目初始化要旋转+移动摄像头
文章目录
TUM、KITTI、EuRoC数据集测试ORB_SLAM2非ROS版本单目、双目、RGBD
Monocular Examples
TUM Dataset
TUM2.yaml 是数据集 freiburg2 的相机参数
TUM3.yaml 是数据集 freiburg3 的相机参数
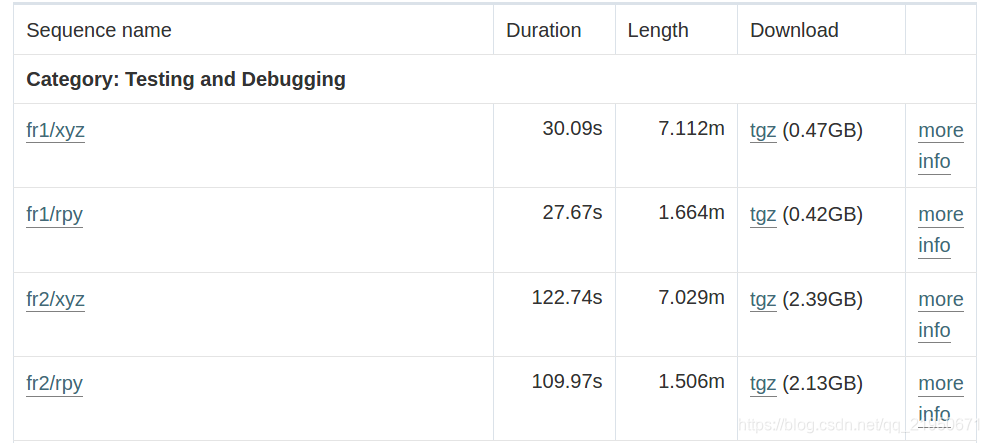
mono_tum 是单目的可执行程序
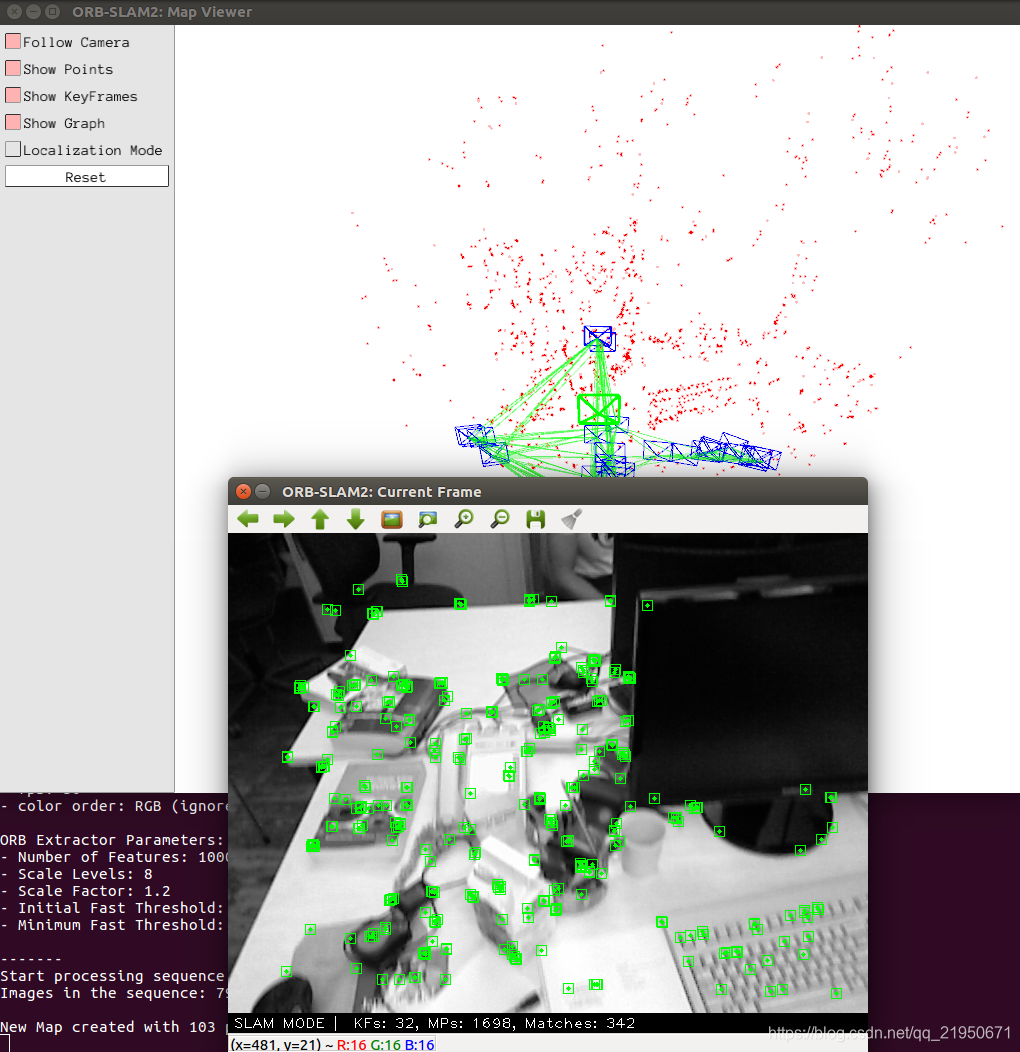
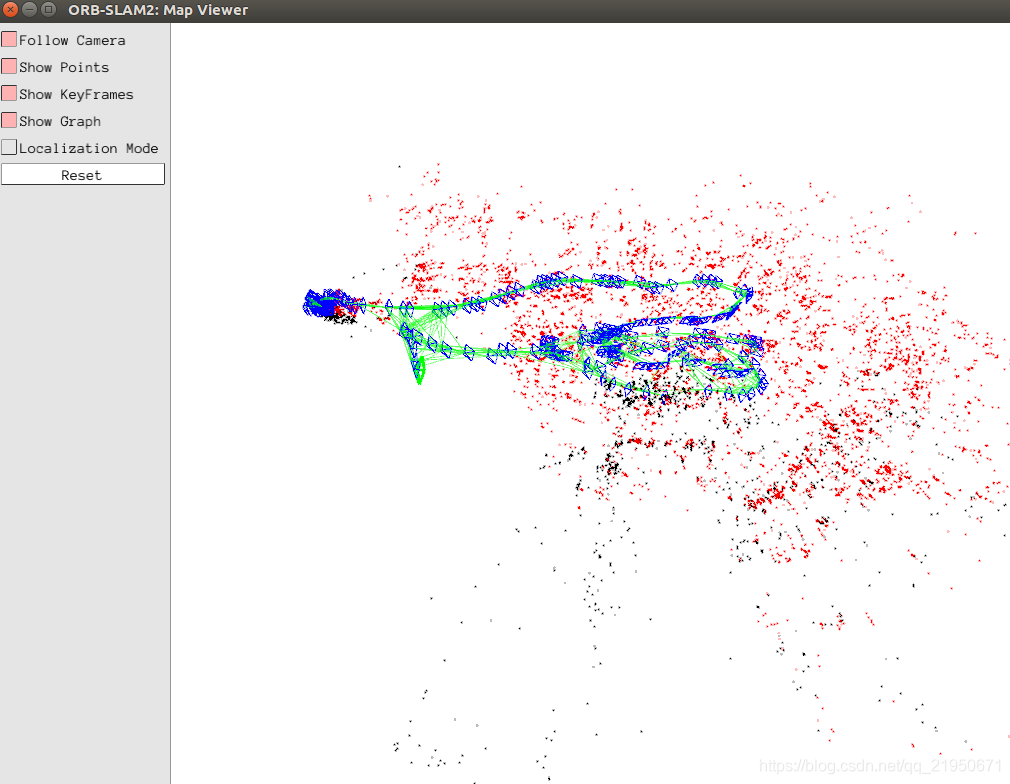
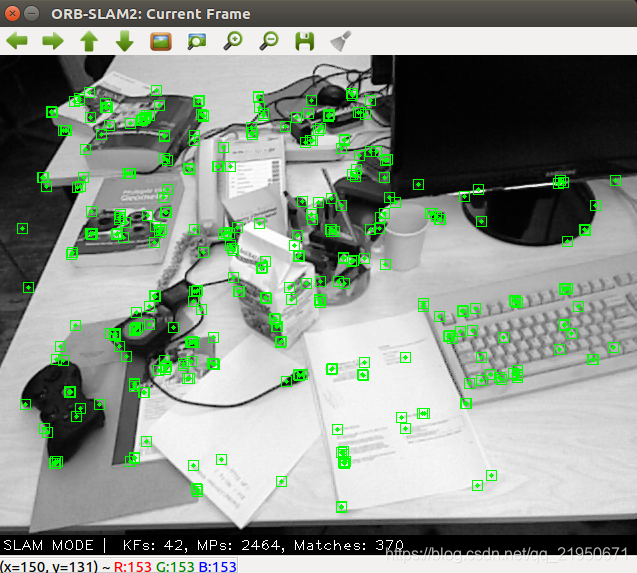
ORBvoc.txt 是回环检测要用到的词典cd /ORB_SLAM2 ./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/q/projects/ORB_SLAM2/TUM_Dataset/rgbd_dataset_freiburg1_xyz 实验结果
EuRoC Dataset
cd /ORB_SLAM2 ./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml /home/q/projects/ORB_SLAM2/EuRoC_Dataset/mav0/cam0/data Examples/Monocular/EuRoC_TimeStamps/MH01.txt 实验结果

Stereo Examples
EuRoC Dataset
./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml /home/q/projects/ORB_SLAM2/EuRoC_Dataset/mav0/cam0/data /home/q/projects/ORB_SLAM2/EuRoC_Dataset/mav0/cam1/data Examples/Stereo/EuRoC_TimeStamps/MH01.txt 实验结果


RGB-D Example
TUM Dataset
python associate.py /home/q/projects/ORB_SLAM2/TUM_Dataset/rgbd_dataset_freiburg1_xyz/rgb.txt /home/q/projects/ORB_SLAM2/TUM_Dataset/rgbd_dataset_freiburg1_xyz/depth.txt > associations.txt ./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml /home/q/projects/ORB_SLAM2/TUM_Dataset/rgbd_dataset_freiburg1_xyz /home/q/projects/ORB_SLAM2/TUM_Dataset/rgbd_dataset_freiburg1_xyz/associations.txt 实验结果
RealSense D435i摄像头实时数据测试ORB_SLAM2的ROS版本单目、双目、RGBD
文章目录
安装 Intel RealSense SDK D435i
安装 Intel RealSense ROS Wrapper D435i
sudo apt-get install ros-kinetic-rgbd-launch sudo apt-get install ros-kinetic-ddynamic-reconfigure mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src/ git clone https://github.com/IntelRealSense/realsense-ros.git catkin_init_workspace gedit realsense-ros/realsense2_camera/src/base_realsense_node.cpp 将 _camera_info[stream_index].P.at(3) = 0; 改 if(stream_index.second == 2) { _camera_info[stream_index].P.at(3) = -0.05; } cd .. catkin_make echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrc RGBD测试
source devel/setup.bash roslaunch realsense2_camera rs_rgbd.launch 查看发布图像话题 rostopic list /camera/color/image_raw /camera/depth/image_rect_raw
gedit /Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 1); message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "camera/depth_registered/image_raw", 1);
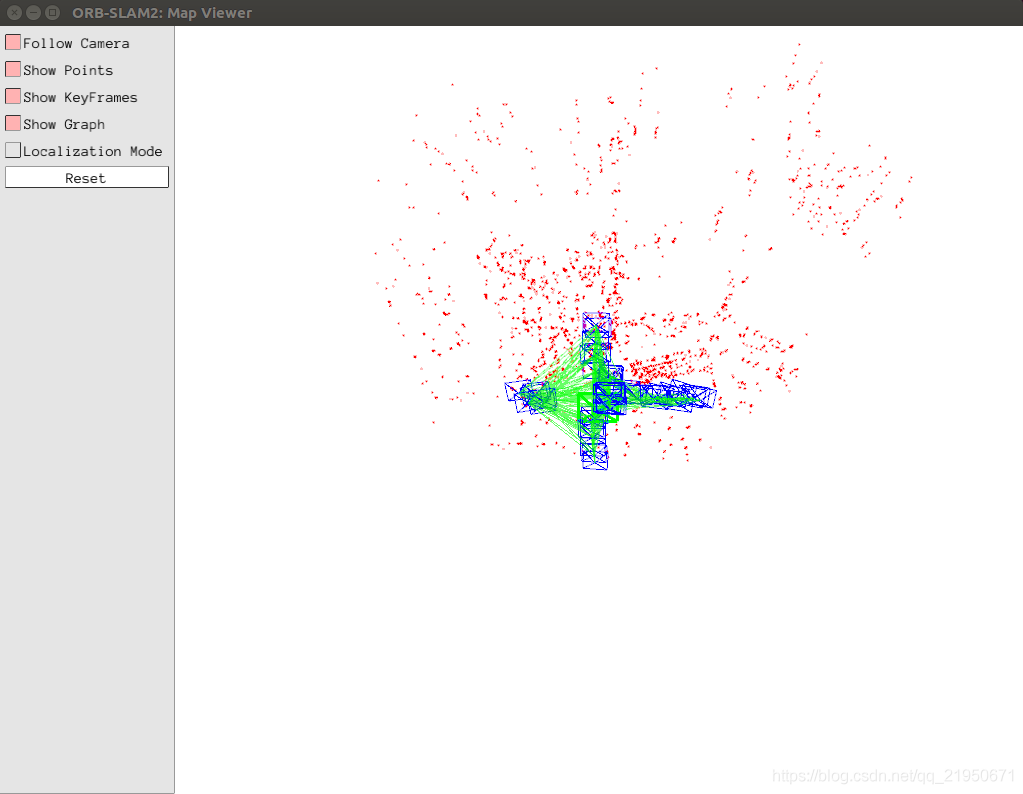
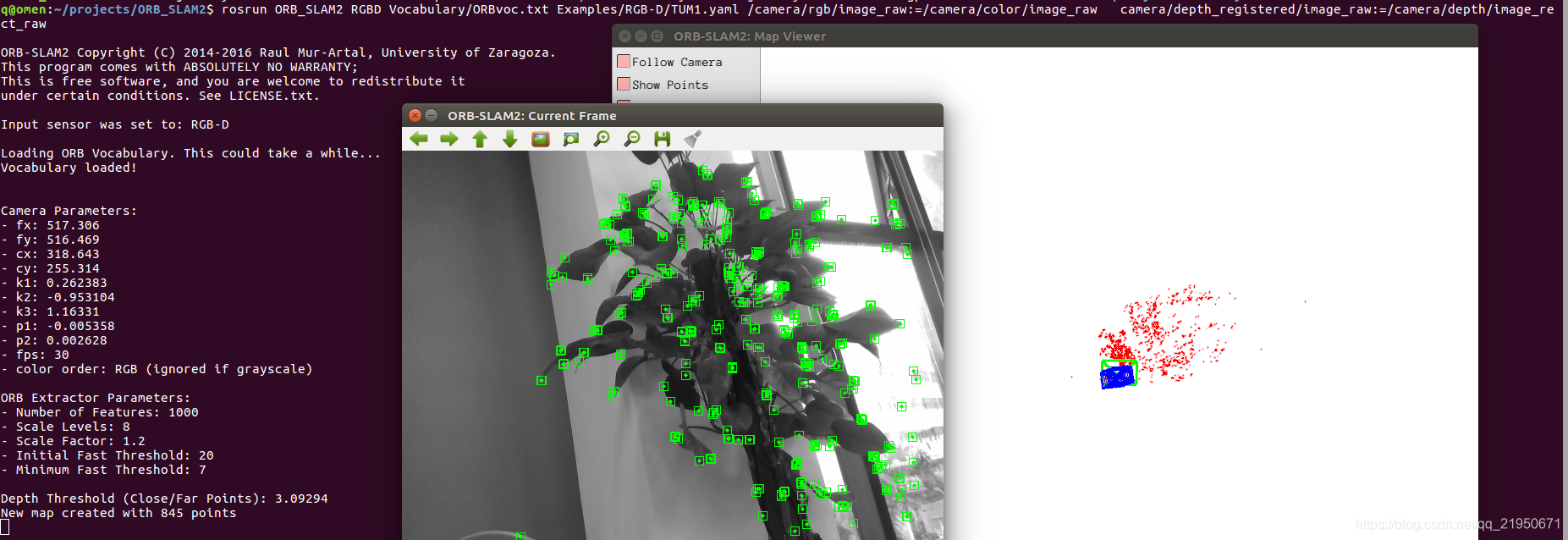
cd /ORB_SLAM2 rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml /camera/rgb/image_raw:=/camera/color/image_raw camera/depth_registered/image_raw:=/camera/depth/image_rect_raw 实验结果
rviz查看点云和图像
rviz
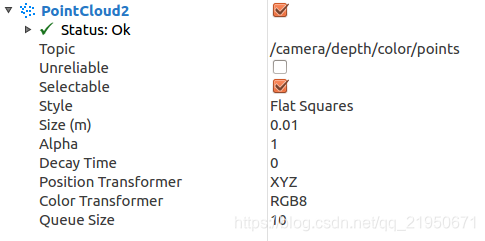
然后 点击Add -> By display type -> PointCloud2 -> ok
然后 更改Topic 如图所示 就可以看到点云了
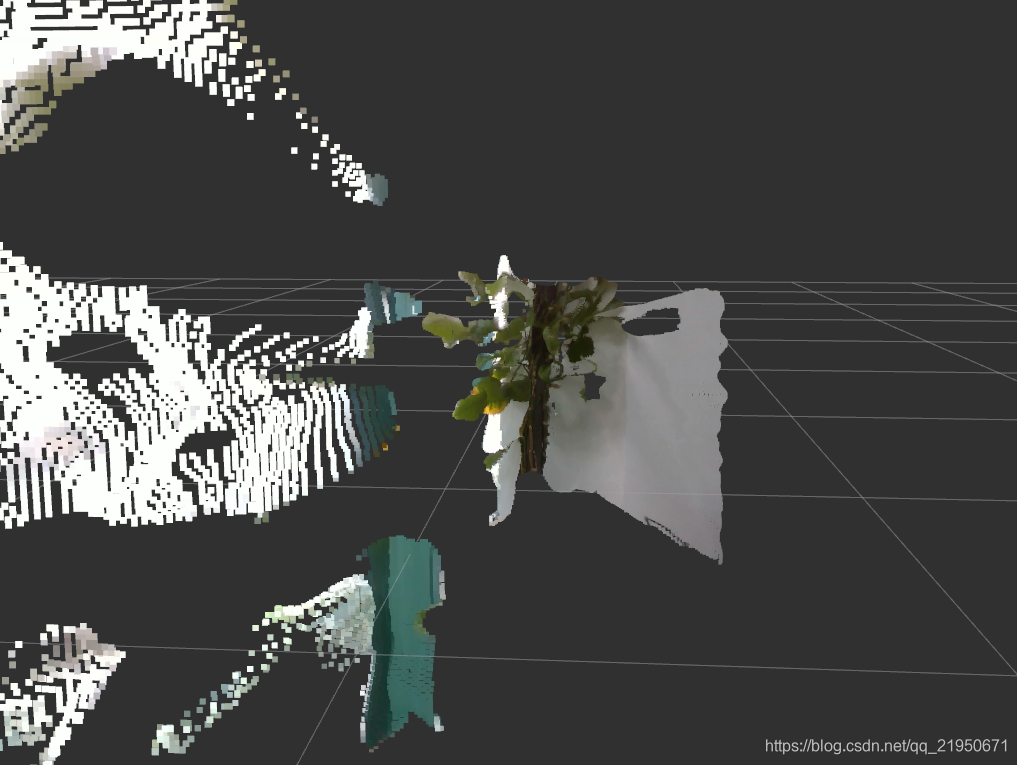
然后更改话题 Image Topic
就可以看到实时采集到的图片了

stereo测试
roslaunch realsense2_camera rs_camera.launch rostopic list /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw
gedit /Examples/ROS/ORB_SLAM2/src/ros_stereo.cc message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/camera/left/image_raw", 1); message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "camera/right/image_raw", 1);
cd /ORB_SLAM2 rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml true /camera/left/image_raw:=/camera/infra1/image_rect_raw camera/right/image_raw:=/camera/infra2/image_rect_raw mono测试
roslaunch realsense2_camera rs_camera.launch rostopic list /camera/color/image_raw
gedit /Examples/ROS/ORB_SLAM2/src/ros_mono.cc ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1, &ImageGrabber::GrabImage,&igb); ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1, &ImageGrabber::GrabImage,&igb);
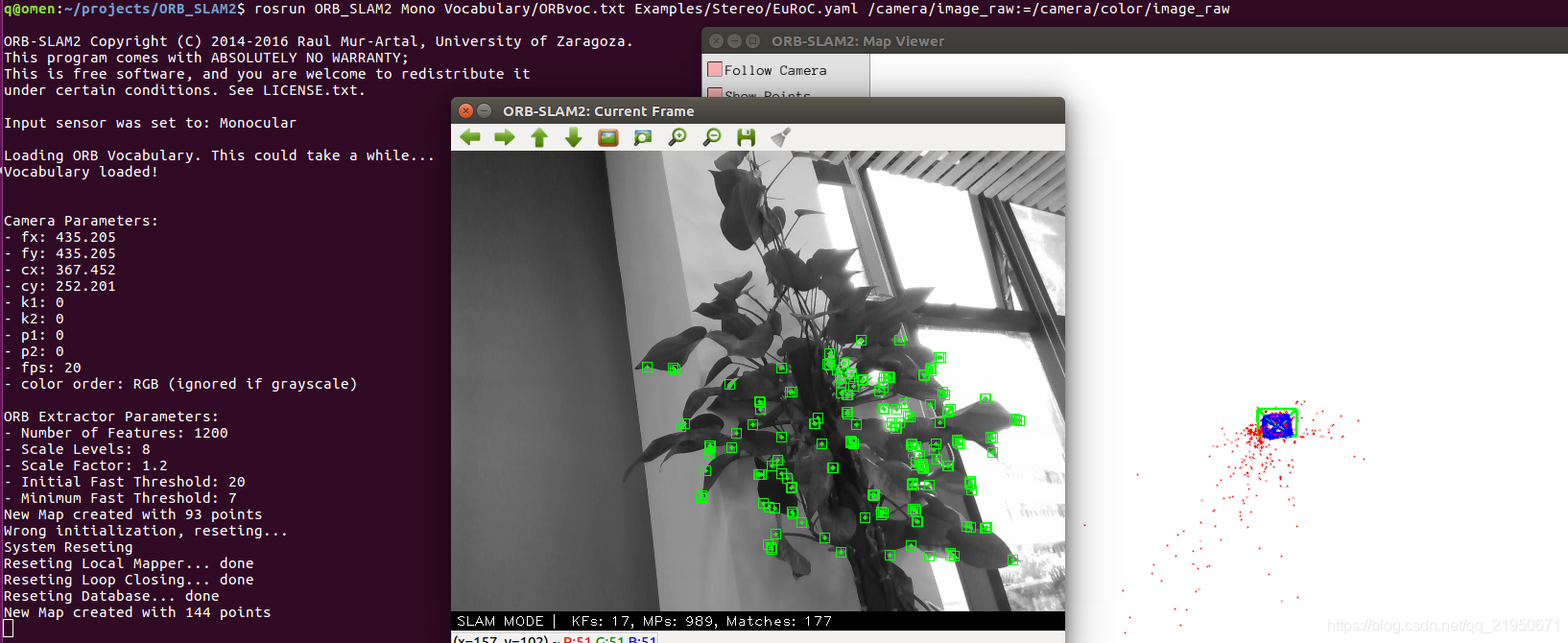
cd /ORB_SLAM2 rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml /camera/image_raw:=/camera/color/image_raw 实验结果
本网页所有视频内容由 imoviebox边看边下-网页视频下载, iurlBox网页地址收藏管理器 下载并得到。
ImovieBox网页视频下载器 下载地址: ImovieBox网页视频下载器-最新版本下载
本文章由: imapbox邮箱云存储,邮箱网盘,ImageBox 图片批量下载器,网页图片批量下载专家,网页图片批量下载器,获取到文章图片,imoviebox网页视频批量下载器,下载视频内容,为您提供.
阅读和此文章类似的: 全球云计算
 官方软件产品操作指南 (170)
官方软件产品操作指南 (170)









